Platinum Sponsors
Website Sponsors
自動運転 AI チャレンジ 2026 解説[01:導入編]
自動運転AIチャレンジ2026の競技概要と参加までの流れを解説する公式動画です。
自動運転 AI チャレンジ 2026 解説[02:Autoware 解説編]
自動運転AIチャレンジ2026で使用するAutowareの構成と基本的な使い方を解説する公式動画です。
自動運転 AI チャレンジ 2026 解説[03:End to End AI編]
自動運転AIチャレンジ2026における End to End AI 部門の考え方と取り組みを解説する公式動画です。
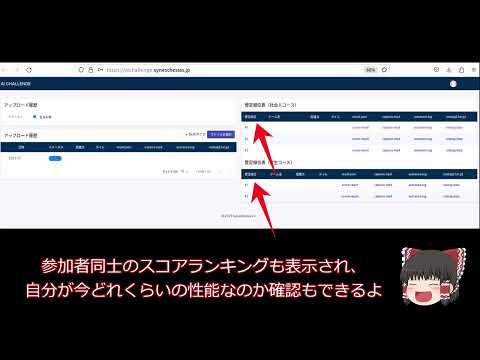
有志参加者がオンライン採点環境(ジャッジサーバ)への提出の流れをわかりやすく解説する動画です。
シティサーキット東京ベイで開催された自動運転AIチャレンジ2024に挑むチームの奮闘を収めたドキュメンタリー映像です。
TIER IV 田中大貴氏によるプレセッション講演。End to End AI 部門を創設した背景と狙いを紹介します。
過去大会参加チーム TPAC の中村友治氏が、コミュニティ発の AI チャットボットを活用して自動運転AIチャレンジを楽しむ方法を紹介するプレセッション講演です。
SUBARU 高田知洋氏によるプレセッション講演。自動運転AIチャレンジに取り組む面白さと奥深さを語ります。
ニコン・トリンブル 杉原公紀氏によるプレセッション講演。自動運転を支える GNSS 測位技術を解説します。
産業技術総合研究所 難波孝彰氏によるプレセッション講演。自動運転AIチャレンジを超えた社会実装と AI 品質マネジメントへの展望を紹介します。
東京大学 塚田研究室 JAVANMARDI Ehsan 氏によるプレセッション講演。V2X が支える協調型自動運転の世界を紹介します。
GMO Various Robotics 加藤健太氏によるプレセッション講演。自動運転AIチャレンジと A2RL の現場から見たレースの世界を語ります。
この講座では Autoware の基本的な開発方法について解説します。 講座は演習形式となっており、課題を達成するためのコードをゼロから開発しながら Autoware の仕組みを学べるようになっています。
ROS2車両制御実習:直進・旋回・後退の3課題を通じて、AckermannControlCommandメッセージの各フィールド(速度・加速度・ステアリング角度など)を適切に設定し、シミュレーター内の車両を操作。緑色のエリアに車両を誘導することで課題達成を目指す基本演習です。
ROS2速度計画実習:車速取得、P制御による速度調整、目標地点での停止計画、Pure Pursuit法による横方向制御を学び、実際の動きをPlotJugglerで可視化しながら自動運転の基本制御技術を習得する。
ROS2のインストール方法を学びます。ROS2 Humble HawksbillをUbuntu 22.04にインストールする手順を説明します。
ROS2の基本的なCLIツールの使い方を体系的に学び、トピックの監視やノード管理をコマンドラインから操作できるようになります。
このコースでは、colconを使用したパッケージビルド、ワークスペース作成、C++/Pythonでのパブリッシャー/サブスクライバーおよびサービス/クライアント実装、カスタムインターフェース開発、パラメータ使用、トラブルシューティングツール活用、プラグイン作成の基礎を学びます。
モビリティ業界未経験から活躍するためのスキル&キャリアパスを紹介する、モビリティDXプラットフォーム主催イベントのアーカイブ映像です。
自動運転のユーザーエクスペリエンス(UX)をテーマにしたアイデアソンです。一次審査を通過した12チームが2025年2月15日の本選でアイデアを競った様子をアーカイブ映像で視聴できます。
ソフトウェア領域の技術マップ、キャリア定義、活用事例(個人の育成)、スキル診断、キャリアプランの解説に加え、SDVスキル標準解説書(PDF)をダウンロードできる公式ページです。











![自動運転 AI チャレンジ 2026 解説[01:導入編]](https://i.ytimg.com/vi/K_ToeWGitbk/maxresdefault.jpg)
![自動運転 AI チャレンジ 2026 解説[02:Autoware 解説編]](https://i.ytimg.com/vi/5BowSyA8hV8/maxresdefault.jpg)
![自動運転 AI チャレンジ 2026 解説[03:End to End AI編]](https://i.ytimg.com/vi/hriSPe97rfQ/hqdefault.jpg)